

复合机器人不但集成了AGV、机械臂等工作单元,同时还采用了机器人视觉定位技术进行二次定位,满足了对整个机械结构运动精度的苛刻要求,避免了AGV、机械臂等多个运动单元的累积精度误差造成的定位精度不达标情况。可使机器人工作有条不紊,配合默契。这种复合机器人可实现搬运、上下料等基本功能,可实现不同工装、夹具的快速切换和实现物料的智能分拣。
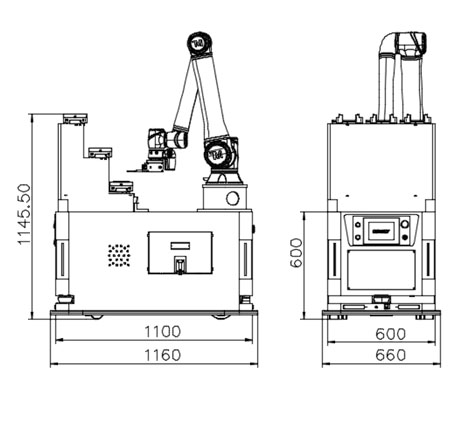
| 外形尺寸 | L1160*W660* H600mm |
| 行走方式 | 磁导航、激光导航 |
| 驱动方式 | 差速驱动 |
| 导航精度 | ±10mm |
| 转弯半径 | 670mm |
| 安全防护 | 激光/机械双重防护 |
| 负载能力 | 400KG |
| 锂电参数 | 48V60AH |
| 机械手臂展长度 | 1100-1300mm |
| 机械臂精度(含视觉) | 0.15mm |
| 机械臂负载 | 12KG |
| CCD像素 | 500万 |
| 声光报警 | |
| 速度 | 1m/s |
 鲁公网安备 37069302000867号
鲁公网安备 37069302000867号
